

¿Qué vas a encontrar?
LA «NUEVA» FOTOGRAMETRÍA
La fotogrametría digital realizada con dron ha permitido la democratización del uso de la misma para grandes y pequeños proyectos.
Sin embargo y a pesar de la relativa facilidad para obtener resultados, muy a menudo se ejecutan de forma automática y desapercibida la asignación de muchos parámetros que cualquier programa de vuelo requiere y que condicionarán al programa fotogramétrico que procesa.
Sin entrar en profundidad en ninguno de estos parámetros y partiendo de una de las más minimalistas y extendidas aplicaciones de planificación de vuelo, veremos algunos aspectos que bien seguro te interesarán. Estamos hablando de la app de Pix4D para la planificación de vuelos fotogramétricos, PIX4Dcapture
Pix4D ha conseguido simplificar al máximo aquellos parámetros determinantes para la obtención de resultados fotogramétricos. De este modo cualquier aficionado podrá obtener productos, que hace pocos años quedarían solo alcance de Organismos Públicos o grandes constructoras. Ahora bien, ¿sabemos qué y cuáles son los parámetros más adecuados a cada cirscuntancia?. Veámolos pues:


OPCIONES DE CONFIGURACIÓN PIX4Dcapture
Podemos llamar proyecto de vuelo al conjunto de cálculos previos a la ejecución de un vuelo fotogramétrico.
En toda misión, tanto en Pix4D como en cualquier otro software de planificación, existe un requisito indispensable, la obtención de una adecuada cobertura de imágenes con el mínimo de ellas, tal que cada parte del terreno por pequeña que sea, debe ser cubierta estereoscópicamente (al menos con dos imágenes), o sea nuestra área de vuelo debe aparecer con imágenes superuestas tanto longitudinalmente como transversalmente.
Esto de manera muy simple es lo que vamos a conseguir con el solape o como Pix4D denomina y aglutina en Overlap.
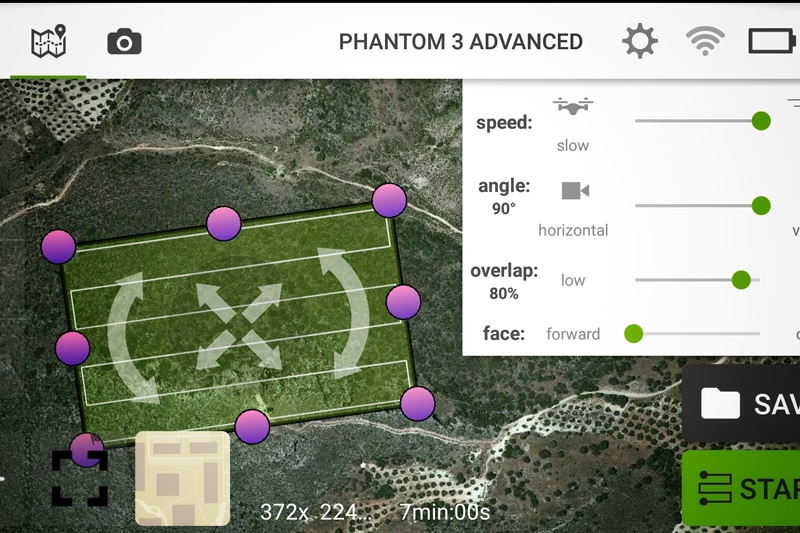
Si pulsamos sobre la rueda dentada accedemos a los parámetros básicos que Pix4D permite modificar, el tercero concretamente es el Overlap. Pix4D no se complica y salvo que internamente realice una minoración, otorga el mismo valor para el solape longitudinal que para el transversal. Esto habitualmente no es así, debido fundamentalmente al tamaño y disposición del sensor.
Para que os hagáis una idea, Photoscan recomienda trabajar con solapes del 80 y 60 %, longitudinal y transversal respectivamente, como mínimo. El valor va a depender del objetivo pero entre 75-80 no andaríamos mal. Pix4D establece tres rangos, 70, 80 y 90% como valores de solape. Repito que no son ni mejores ni peores, son alternativas a múltiples casos (terreno llano, relieves abruptos, vegetación densa, edificios..)
Pasemos a la velocidad o speed. Pix4D, tiene en la base de datos varios modelos de dron de los que conoce todos sus parámetros. Si tu dron es un Phantom 3 sabrá que su velocidad máxima ronda los 15m/seg y entre esa y la mínima, puedes ajustar la que tu consideres. Pero, te preguntarás que debo poner, ¿no? Pix4D por defecto te coloca la velocidad máxima, que será aquella que te aporte una mayor superficie, por contra debes saber que si las condiciones no son favorables, por ejemplo con presencia de viento, el dron “bailará” ligeramente y muy posiblemente las imágenes no tengan toda la nitidez que desearías. Te recuerdo que uno de los parámetros que más valora un programa de procesado fotogramétrico es el contraste y la nitidez de la fotografía, lo que le facilita la localización de puntos significativos en las imágenes, obtención de buenas texturas, buenos ortomosaicos, etc. Un compromiso intermedio entre autonomía y nitidez será lo más adecuado para valorar el lugar correcto en el slider de speed.
Seguimos con el ángulo de la cámara. Por defecto es 90º, o sea completamente vertical, que es lo más adecuado para nuestras misiones, salvo que optes por hacer una rejilla como la que te permite Pix4D, donde las pasadas se cruzan transversalmente y lo más importante el ángulo de la cámara pasa de 90 a unos 70º grados para captar la mayor información posible de cualquier elemento vertical.
Salvando este y otros casos particulares, nuestra intención será tener las menores deformaciones en la imágenes y eso implica evitar la inclinación de la fotografía para evitar desviaciones directamente proporcionales al ángulo de la cámara.
El ultimo parámetro de los ajustes incluye la orientación del sensor que para la mayor parte de los drones que usan esta aplicación será necesario tomar la opción de forward, o sea con el dron avanzando con su sensor en posición apasaida. Si tu cámara tuviera un sensor con otra disposición, o sea vertical deberías tomar la opción center.
Por último y ya a la derecha de la pantalla podremos de forma dinámica arrastrando los valores en pantalla, seleccionar la altura de vuelo. Habitualmente en fotogrametría requerimos como valor fundamental, o bien el GSD o bien la escala del producto que se nos pida. Con el GSD tenemos la escala y con la escala podemos averiguar el GSD. En cualquier caso para saber el GSD tendrás o bien que calcularlo manualmente o bien esperar a procesar las imágenes en algún software fotogramétrico.
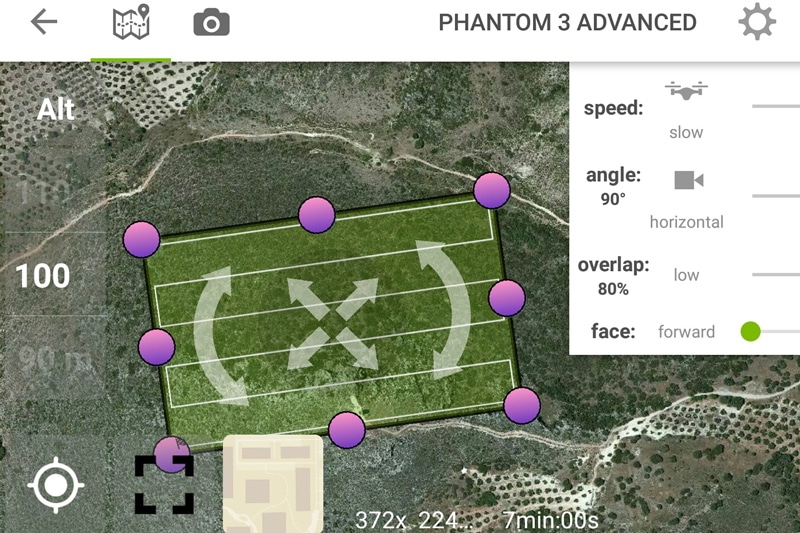
Conviene saber cómo se relacionan el GSD, la altura de vuelo, la distancia focal (ya se la dijistes a Pix4D al seleccionar el modelo) y la escala, para que elijas por ti mismo que te conviene más.
GSD= (H/f)CCDsensor, para simplificar a mayor altura, mayor GSD, menor resolución y viceversa, a menor altura, menor GSD, y mejor resolución, como contrapartida tu misión cubrirá menor superficie a igual autonomía.
Sopesa tus intereses, Pix4D simplifica y básicamente te viene a decir a mayor elevación, más área cubierta, y a menor altura, menor área cubierta. Calcula el GSD para tu cámara o prueba tu dron a distintas alturas y crea tu propia tabla de resoluciones para tener una referencia del GSD que puedes obtener de forma aproximada (otras app te lo indican de partida).
Por otro lado, es importante que sepas, para acabar, que ese valor de GSD en el caso de Pix4D, es para misiones donde la altura de vuelo se mantuviera constante, me explico. La altura del vuelo vendrá dada por la situación del punto de partida (HOME) sin embargo a lo largo de la misión el dron encontrará desniveles que harán que unas veces esté a menor distancia del terreno(mejor GSD) y otras a más distancia del terreno(peor GSD). Deberás ser consciente de este detalle pues Pix4D considera un valor uniforme y no es así. La solución sería que Pix4D permitiera cargar un MDT de tal modo que el vuelo no fuera un plano horizontal a una altura prefijada, sino que se ajustara a los desniveles del terreno como otras app del mercado posibilitan.
A pesar de ésta y otras limitaciones, Pix4Dcapture es una fantástica plataforma de iniciación a la fotogrametría digital que generaliza su uso de forma gratuita,y recordad que de nosotros y nuestro conocimiento dependerá obtener resultados adecuados.
Buenos vuelos.
Deja tu comentario
Debe iniciar sesión para escribir un comentario.